
中尾研究室には,研究に必要な設備が整っており,様々な実験・分析を行うことが可能です.
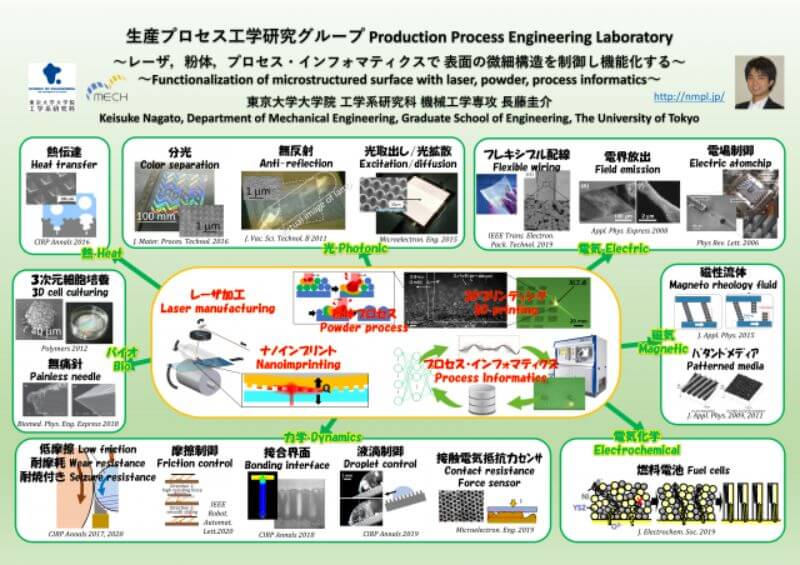
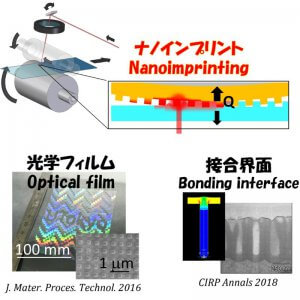
表面の微細構造は,光・熱・電気・力学など様々なおもしろい機能を発現します.その表面を高速で大面積に加工する方法とその応用を研究しています.特に,レーザを用いて局所的に表面のみを加熱・冷却することで微細構造を転写するレーザアシストナノインプリント法の開発,それを用いて大面積光学フィルム,高熱伝達沸騰界面,燃料電池,低摩擦表面,接合界面などの応用を模索しています
粉体加工は,自由度の高い3次元構造,異種材料の複合材料などは,連続体を加工する従来の鋳造や鍛造では実現できない加工法です.特に,金属3Dプリンティング(Additive Manufacturing)は,レーザを用いた局所的に溶融・凝固を繰り返すことでそれを実現する方法ですが,熱・流体・材料・機械の四力学を総動員する必要のある複雑現象で,その現象は明らかになっていません.その現象解明とプロセス最適化の研究を行っています.
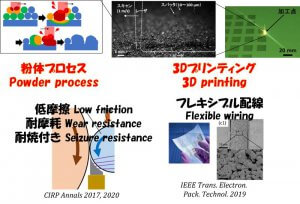
従来の粉体プロセスは,分散・混錬・塗布・乾燥からなり,加えてレーザを用いた積層レーザ焼結法はさらに複雑です.しかし,最適なプロセスパラメータセットを見つける必要があります.その物理現象はマイクロ・ナノスケールで高速現象のためモデルベースの現象解明には限界があります.物理現象を特徴づける「良い」データをセンシングし,オートエンコーダなどの「かしこい」機械学習をすることで,高効率にプロセスウィンドウを探索するデータ駆動型「プロセス・インフォマティクス」を開発しています.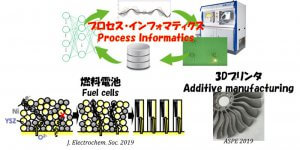
カーボンニュートラルおよび日本の水素ビジネスの活性化にむけて, ものづくり×測定×インフォマティクスというキーワードで燃料電池の性能向上に取り組んでいます.
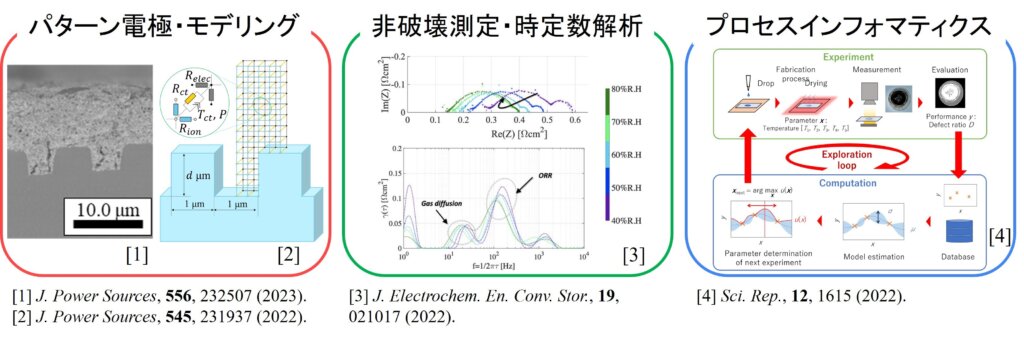
ものづくり ー マイクロスケールの微細構造を持つパターン電極の作製手法の開発, および反応輸送シミュレーションや等価回路モデリングによる構造解析に取り組んでいます.
測定 ー インピーダンス測定をはじめとした非破壊測定・時定数解析により, 各種抵抗成分を分離して評価しています.
インフォマティクス ー 複雑現象である粉体成膜プロセスにおいて, 機械学習×自動実験により高効率でプロセスパラメータ探索を行うことのできるシステムを開発しています.
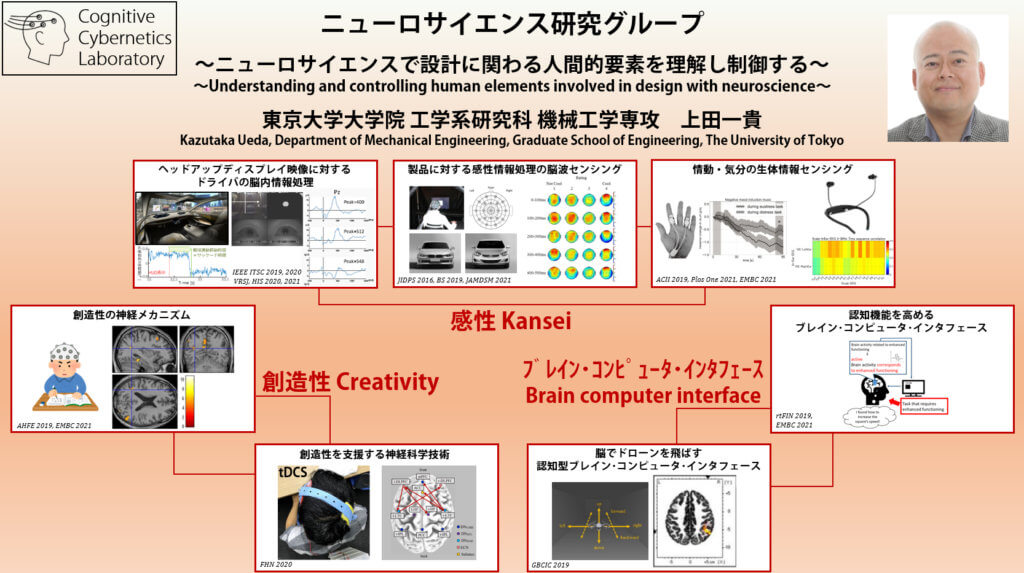
製品の見た目,製品音の聞き心地,製品表面の触り心地などいった感性品質は,製品の魅力的価値を高める重要なファクタです.ユーザの期待や要求に沿うような感性品質を設計するためには,ユーザの感性評価のメカニズムを理解し,それらを予測・制御するためのモデリングが必要です.本研究グループでは,人間の心理や行動をその生物学的基盤である脳から理解しようとする認知神経科学的アプローチにより,感性をセンシングし,モデリングすることを目指しています.感性のセンシングには,脳波計測法(EEG),機能的磁気共鳴画像法(fMRI),視線計測法などの人間の生体信号を計測する技術を用いています.

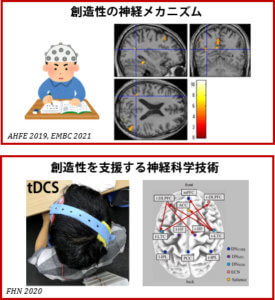
ユーザの感性に加えて,設計者の創造性も設計に関わる人間的要素として重要です.創造性の中でも,斬新で価値あるアイデアを生み出す能力を創造的思考と呼びます.創造的思考のメカニズムを理解し,何らかの手法で創造的思考を増強することができれば,革新的な製品の設計を支援することが可能になります.本研究グループでは,認知神経科学的アプローチにより,工学設計における創造的思考のメカニズムを明らかにし,創造性の支援技術を開発することを目指しています.創造性のセンシングには,脳波計測法(EEG),機能的磁気共鳴画像法(fMRI)などの脳機能計測技術を用いています.
N・ウィーナーによって提唱されたサイバネティクスは,生物と機械における通信,情報処理,制御の問題を統一的に扱う学問分野です.これまでに,サイバネティクスの考え方に基づき,人間の視聴覚機能や身体機能を補償・拡張するサイボーグ技術の開発が進められてきました.近年,脳機能計測・解析技術の発展により,人間の感情や認知に関わる脳機能を高精度に計測し,制御,拡張できる可能性が出てきました.本研究グループでは,人間の感情・認知機能を計測・制御するためのブレイン・コンピュータ・インタフェース技術を開発することを目指しています.
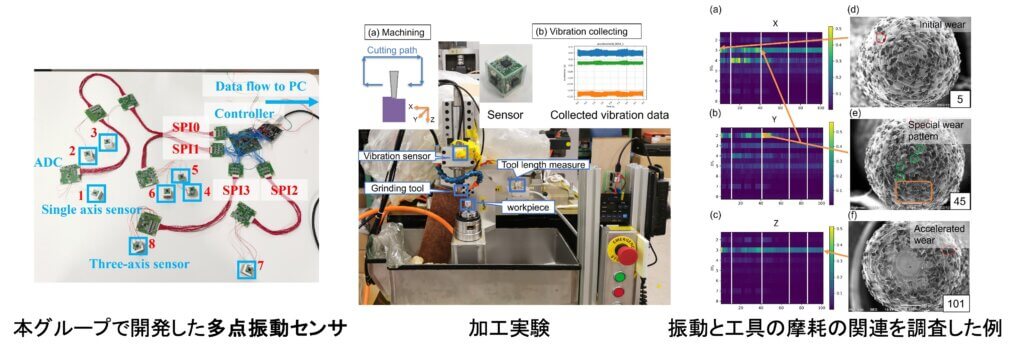
テーマ名: 動特性のリアルタイム推定に基づく精密加工機のアクティブ制振
背景: 特に精密加工機において,動特性は加工精度に大きな影響を与える.しかし,加工中の動特性の変化は無視されているというのが現状である.動特性の変化を加工中にリアルタイムで捉えて,機械の加工機の動作を修正することが必要.
目的: 機械の動特性変化をリアルタイムで推定し,機械の状態や摩耗状態を推定する.
方法:
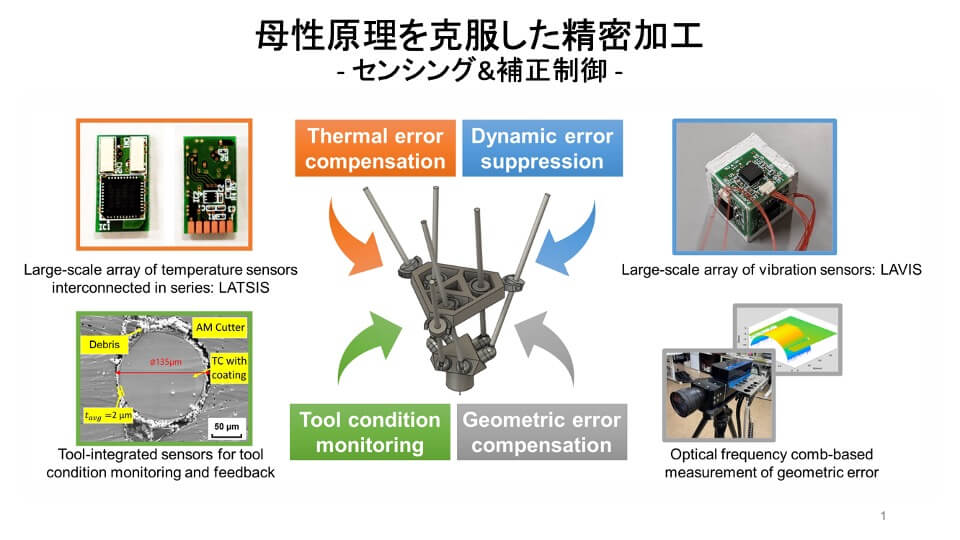
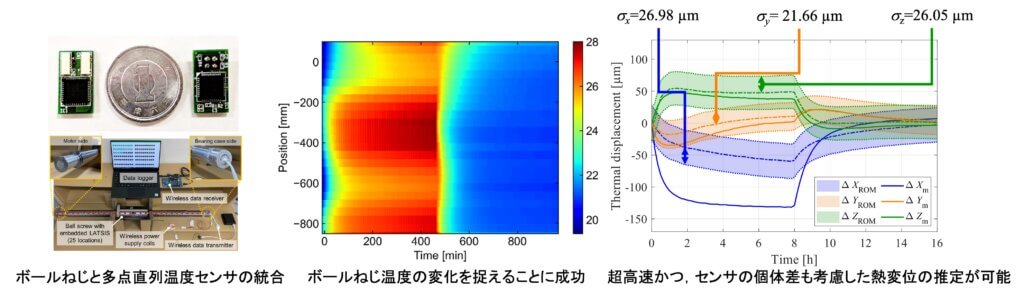
テーマ名: 大規模温度計測に基づく高精度な熱変位補償の実現
背景: 熱変位は工作機械の加工誤差要因の7割を占めると言われ,今もなお大きな課題となっている.
目的: 加工中の誤差をキャンセル制御するロバストなリアルタイム熱変位補償の実現
方法: 機械学習モデル(RNN,LSTMなど)による非線形性の考慮を目指す.また,大規模温度センサアレイについて,切削液使用下でも安定稼働可能な防水・防塵化,高精度温度センサチップの搭載,回路基板の小型化,省電力化など実用化に向けた開発を行い,複数機種(ワイヤソー,複合加工機,CFRP5軸加工機)に搭載して評価実験を進める.
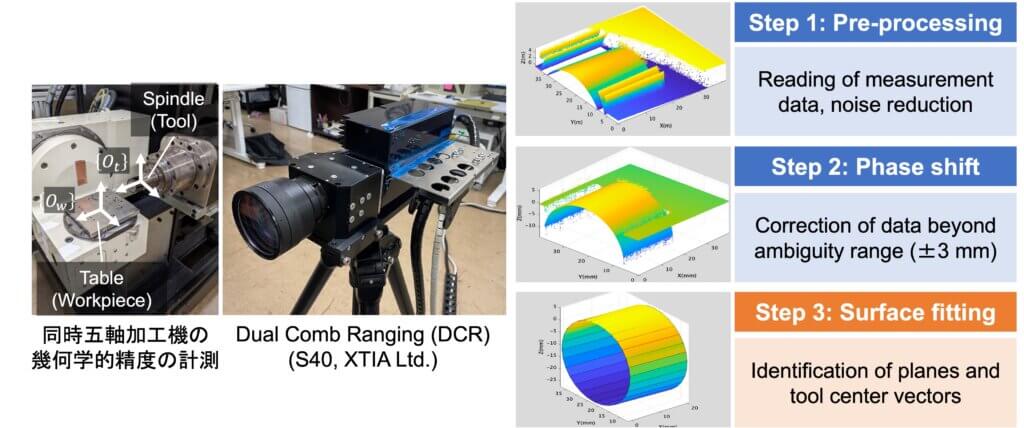
テーマ名: 光周波数コムに基づいた精密加工機の幾何学的誤差の機上測定
背景: 精密加工に代表される製造プロセスにおいて,プロセス中に機械の精度は悪化していく.これを把握することが必要.
目的: インプロセスで幾何学的精度の計測を実現すること.
研究内容:
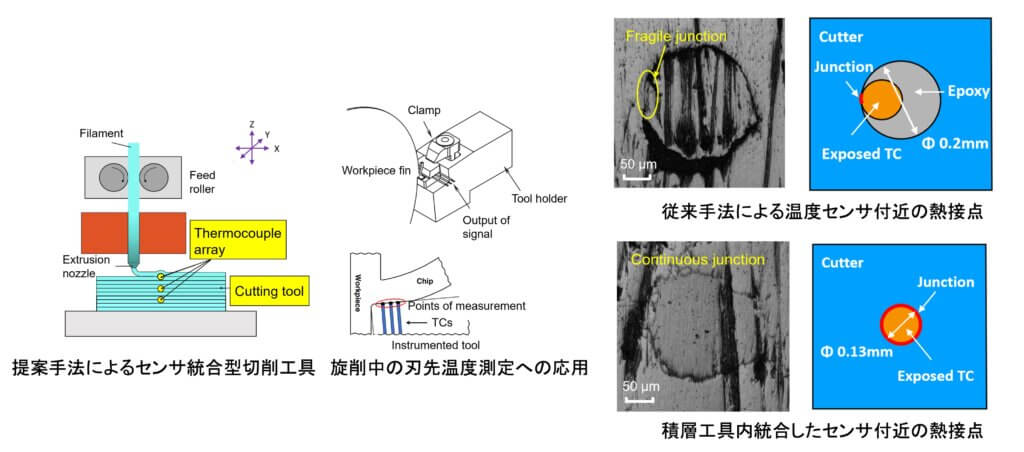
テーマ名: 高輝度放射光およびセンシング技術を駆使した精密加工現象の解明
背景: 刃先温度は加工品質に最も大きな影響を与える.加工中に刃先温度を把握する必要があるが,1000 ℃を超える高温高圧であるため,困難.
目的: 温度センサを内部に統合した,新たな切削工具の実現
研究内容:
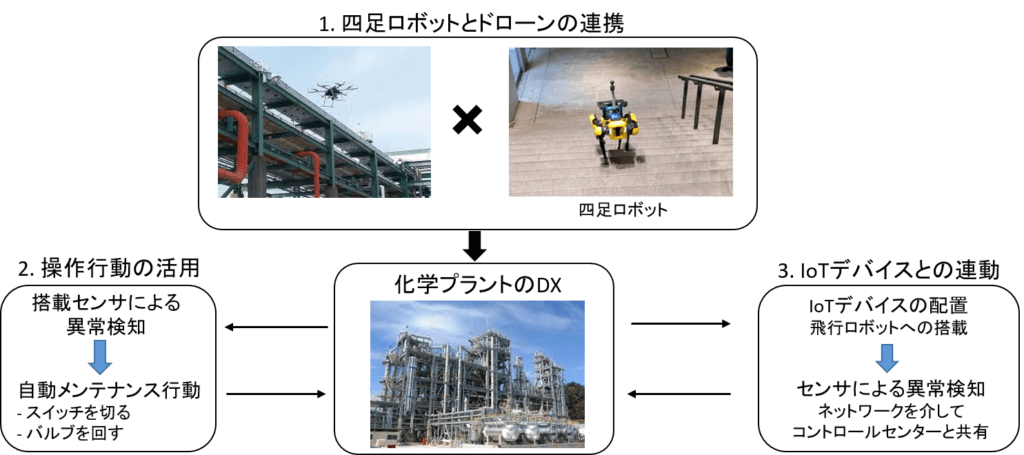
テーマ名: 化学プラントでの自動巡回、定期点検のための四足ロボット・ドローンのシステム開発
目的: ロボットの自動見廻り点検を中心とした化学プラントのDX(デジタルトランスフォーメーション)の実現
研究内容:
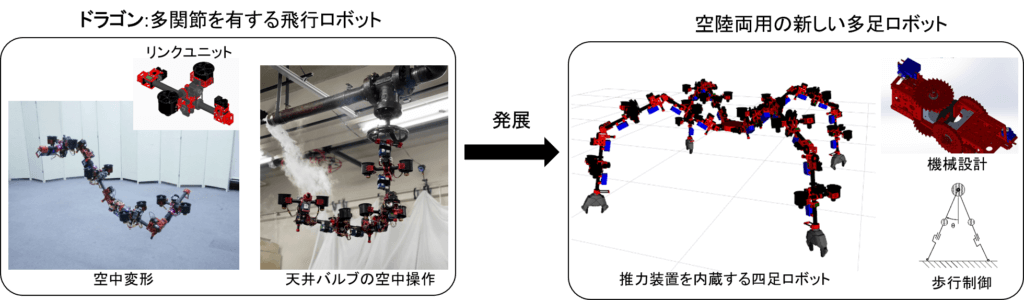
テーマ名: 多関節を有する飛行ロボットの空陸両用に向けたあたらしい機械設計と動作制御
目的: 地上で歩行できて、飛行もできる新しいロボットを実現していく
研究内容: